Quick Facts
-
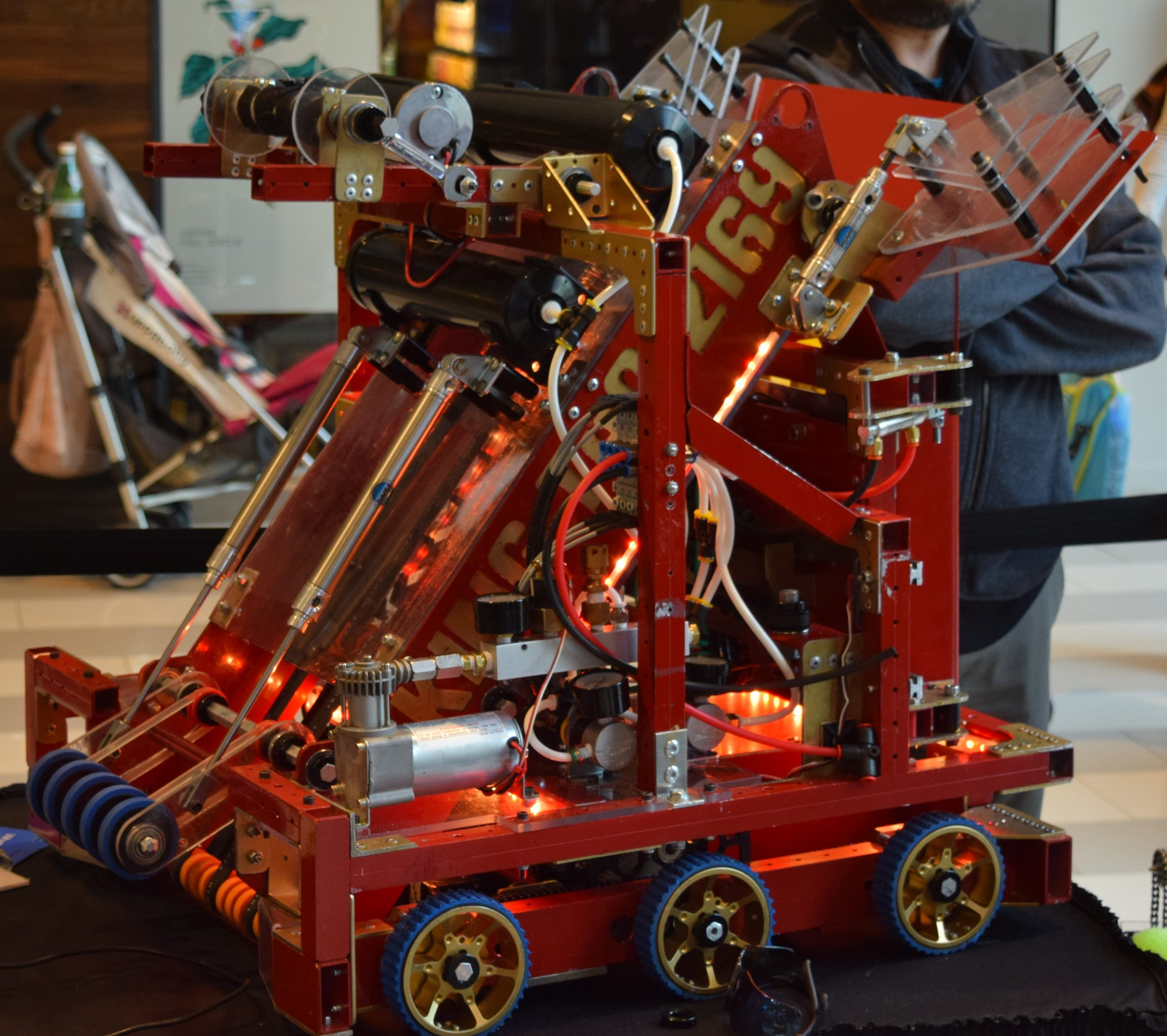
Name: Sir Bedivere
-
Year: 2017
-
Weight: 120 lbs
-
Programming Language: Java
-
Status: Showcase
-
Game: FIRST Steamworks
-
Initial Size: 26.75″ x 36.75″ x 60″
-
Extended Size: 37″ x 26″ x 60′
-
Competition History
- Central Illinois Regional: Chairman’s Award, Finalist
- Minnesota North Star Regional: Entrepreneurship Award
- World Competition: Curie Divison Finalist
- World Competition: Einstein (St. Louis) Chairman’s Finalist
- Minnesota State High School League FIRST State Robotics Championship
-
Features
- Drive Train
- Tank Drive
- Four CIM West Coast Products DS Gearbox
- High Gear: 16ft/s
- Low Gear: 4.5ft/s
- AndyMark Performance Wheels, Blue Nitrile Tread
- Ground Intake
- Blue Banebot rollers powered by 1 Bag motor
- Orange Banebot wheel roller system
- Human Player Intake
- Aluminum tray that delivers gear to slider
- Actuated into two positions by pneumatic cylinders
- Gear Slider
- Linear actuating gear carriage to allow for placement of gear even when drivetrain is offset
- Autonomous Visual Tracking system to automatically align gear to peg
- Powered by 1 Bag motor geared at 30:1
- Active deployment system using two doors powered by pneumatic cylinders
- Gear Carriage rode on McMaster Car linear slides
- Hanger
- Hook velcro drum meets loop velcro rope for touch and go climb
- Hanger mounted on a pivot for smooth climb and great center of gravity placement
- Powered by 1 CIM motor through a 50:1 gearbox
- 4 second climb
- Drive Train
Competition Rankings
Central Illinois Regional
Rank 7 of 40
Minnesota North Star Regional
Rank 25 of 60
Curie Division
Rank 14 of 68
MSHSL FIRST State Robotics Championship
Rank 3 of 36
Season Challenges:
- Programming a 2 gear autonomous. Was within inches of succeeding at North Star regional, and was the only attempt we had in competition play.
- Door delivery system would misfire and drop a gear if the robot was hit hard enough. We solved this by disabling the bump sensor unless a button on the secondary driver’s controller was pressed.